








































































-5-200x160w.jpg "外部(アクメ)リニアステッピングモーター")

 長さ 100mm")
 長さ 100mm")




















 長さ150mm")
 長さ 32mm")
 長さ 150mm")
 長さ 150mm")
 長さ 250mm")
長さ150mm")
長さ330mm")
 長さ 355mm")
 長さ 200mm")
 34mmスタック 0.4A リード線 8mm (0.31496\") 長さ 320mm")
 リードの長さ 250mm")

 長さ 250mm")
 長さ 300mm")
 長さ 100mm")
 長さ 200mm")
 長さ 300mm")
")
 長さ 300mm")
 長さ 200mm")

ステッピングモーターとサーボモーターはどちらも産業用ドライブ制御の重要な制御コンポーネントであり、幅広いアプリケーションで使用されます。ただし、多くのお客様にとって、これら2種類のモーターの主な違いを理解していないため、どのように選択すればよいかわかりません。では、ステッピングモーターとサーボモーターの主な違いは何ですか?以下は、それらの違いの簡単な説明です。
1. 動作原理
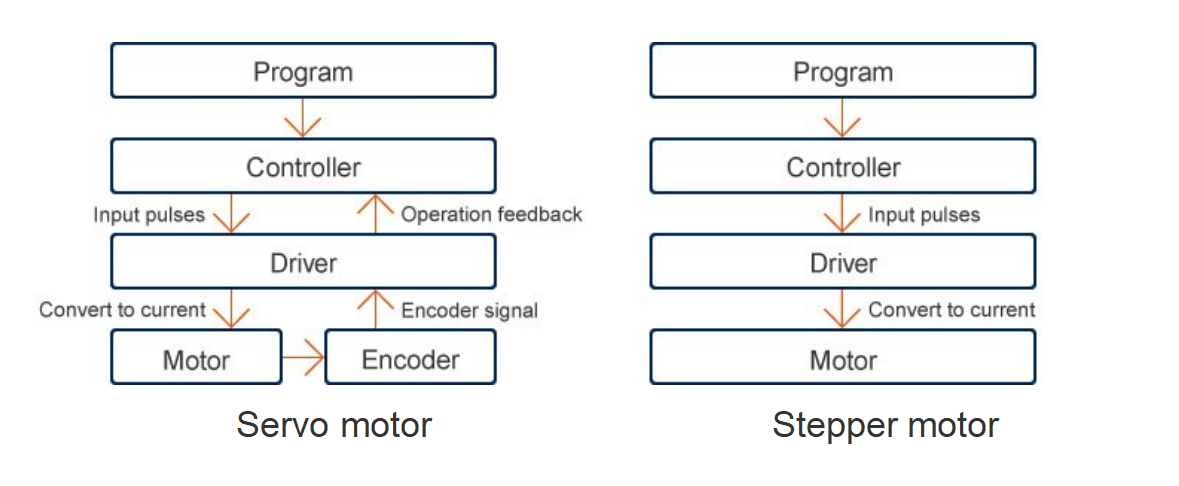
これら2種類のモーターは、動作原理が大きく異なります。ステッピングモーターは、電気パルス信号を角変位または線形変位に変換する開ループ制御要素です。
サーボモーターは、主にパルスに依存して位置決めを行います。サーボモータ自体にパルスを送る機能があります。サーボモーターの回転角ごとに、対応する数のパルスが送信され、サーボモーターが受信したパルスと閉ループが形成されます。これにより、システムは、送受信されたパルスの数を正確に知ることができます。 、モーターの回転の正確な制御と正確な位置決めを可能にします。

2. 速度とトルク
ステッピングモーターは低速で動作しているときに低周波振動を起こしやすいため、ステッピングモーターが低速で動作している場合、通常、次のような低周波振動現象を克服するためにダンピング技術が必要です。モーターにダンパーを追加したり、ドライバーに細分化技術を使用したりします。サーボモーターはこの現象の影響を受けず、閉ループ制御特性により、高速で優れた性能を維持します。両者のモーメント-周波数特性は異なり、一般的にサーボモーターの定格速度はステッピングモーターの定格速度よりも速くなります。ステッピングモーターの出力トルクは速度が上がると低下しますが、サーボモーターは定トルク出力であるため、ステッピングモーターには通常過負荷能力はありませんが、ACサーボモーターの方が過負荷能力が高くなります。
要約:
ステッピングモーターの速度とトルク:
- a. ステッピングモーターの速度はサーボモーターよりも遅く、通常のステッピングモーターの最高速度は1500RPMです。
- b. モーター速度が上がると、モータートルクが下がります。
- c. 低速アプリケーションで優れたトルクを提供します。
- d. ステッピングモーターは、トルク制御アプリケーションでは役に立ちません。
サーボモーターの速度とトルク:
- a. サーボモーターはステッピングモーターよりも高速ですが、市場では、最大5000RPMまでの異なる速度のドライブが得られます.
- b. 高速で高トルクが得られます.
- c. 高速アプリケーションで優れたトルクを提供します.
- d. サーボモーターはトルク制御アプリケーションで使用できます. (例:ナット締めツール)
3. 運用パフォーマンス
ステッピングモーターは通常、開ループ制御されています.ステップの損失またはブロッキングは、開始周波数が高すぎる場合、または負荷が大きすぎる場合に発生する可能性があります.それらを使用するときは、速度の問題に対処するか、閉ループ制御用のエンコーダを追加する必要があります.サーボモーターは閉ループ制御ですが、制御が簡単で、ステップの損失に悩まされることはありません.
4. コスト
ステッピングモーターには、コストパフォーマンスの点で利点があります.同じ機能を実現するために、サーボモーターの価格は同じ出力のステッピングモーターの価格よりも高くなっています.サーボモーターの高応答、高速、高精度は、必然的にそれらがより高価であることを意味します.
5. 最適なモーターを選択してください
サーボ制御システムは、800 RPMを超える速度を必要とし、高い動的応答が必要なアプリケーションで、より優れたパフォーマンスを発揮すると一般に考えられています.ステッピングモーターは、低速、低速から中速の加速、およびより高い保持トルクを必要とするアプリケーションに適しています.
実際には、サーボモーターとステッピングモーターの両方に独自の特性があり、それらのアプリケーションで相互侵入する可能性があります.精密製造技術と駆動制御技術の進歩に伴い、ステッピング技術も改善されており、ステッピングモーターは依然として重要な業界での地位を維持しています.
サーボモーターまたはステッピングモーターを選択する際のヒントはありますか?
A. 以下の要件に応じて、サーボモーターを選択します.
- a. 位置フィードバックが必要な場合.
- b. 高速アプリケーション用.
- c. 速度制御アプリケーション.
- d. トルク制御アプリケーション.
- e. 複雑な機械システムの場合.
- f. より正確で高速な機器の場合.
B. 以下の要件がある場合は、ステッピングモーターを選択します.
- a. アプリケーションは位置フィードバックを必要としないはずです.
- b. 低速アプリケーションの場合.
- c. ステッピングモーターは位置制御アプリケーションでのみ使用できます.
- d. 単純な機械アプリケーションの場合.
- e. アプリケーションがトルクを保持するためのものである場合.
6. サーボおよびステッピングモーターの産業用アプリケーション
a. サーボモーターの一般的な用途:
- ロボット
- 包装機械
- カメラのオートフォーカス
- CNCマシン
- カッティングマシン
- せん断および成形機
- 比例バルブ制御
- 印刷機
b. ステッピングモーターの一般的な用途:
- 低コストのCNCマシン
- ボールねじの動き(スプレー塗装または紙切り機)
- 正確な上下運動(溶接機)
- 3Dプリンター
- 小型ロボット
- テキスタイルマシン
- 医療機器
7. サーボモーターとステッピングモーター(表内)
| # | 仕様 | サーボモーター | ステッパーモーター | |
| 1 | タイプ | ACサーボモーター | インテグレート/DCサーボモーター | オープンループ/クローズドループステッパーモーター |
| 2 | コスト | 高価 | 中程度 | コスト効果的 |
| 3 | 速度 | 高速(3000RPMに評価) | 高速(3000RPMに評価) | 低速(最大1000RPM) |
| 4 | トルク/速度制御 | トルク制御、速度制御 | トルク制御、速度制御 | トルク制御または速度制御モードなし |
| 5 | 入力電流 | AC電流 | DC電流 | DC電流 |
| 6 | トルク | 高速での高トルク | 高速での高トルク | 低速での高トルク |
| 7 | 要件 | デバッグが必要 | デバッグが必要 | 調整不要 |
| 8 | 消費電力 | より多くの電力を消費 | より多くの電力を消費 | より少ない電力を消費 |
| 9 | 機能 | 立ち上げが複雑 | 立ち上げが複雑 | デバッグが簡単で便利 |
| 10 | サイズ | 3つの電力範囲: 400W, 750W, 1000W | 90Wから750Wの複数の電力範囲 | 最大750W |
現在、STEPPERONLINE では、AC サーボモーター、DC サーボモーター、統合サーボモーターなど、広く認知されているさまざまなサーボモーターを提供しています。 今後、当社は大切なお客様のために、より多くの高品質のサーボモーターを開発し、発売していきます。
