リード 10mm(0.393701\") リミットスイッチ付き")
 リード 5mm(0.19685\")リミットスイッチ付き")
 リード 2mm(0.07874\")リミットスイッチ付き")
 リード 1mm(0.03937\") リミットスイッチ付き")
 リード 1mm(0.03937\")リミットスイッチ付き")
 リード1mm(0.03937\") センサー付き")
 リード1mm(0.0393インチ) センサー付き")
 リード1mm(0.03937\" ) センサー付き")
 リード2mm(0.0787インチ) センサー付き")















ユニポーラ駆動: モーターの異なる巻線が特定のパターンに従って順番に励磁されますが、各巻線の電流の方向は常に同じです。これをユニポーラ駆動と呼びます。
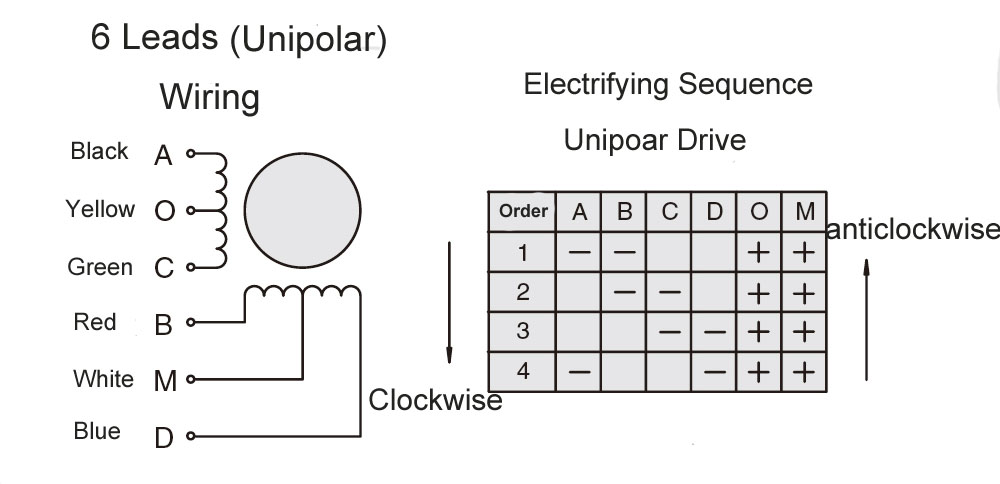
ユニポーラ駆動回路は、4 つのトランジスタを使用して、ステッピング モーターの 2 つのフェーズを制御します。 モーターの固定子巻線構造は、図 1 に示すように、センター タップ付きの 2 組のコイルで構成されています。モーター全体には、外部に接続された 6 本のワイヤがあります。 AC 側に同時に通電することはできません (BD 側も同様)。そうしないと、磁極で 2 つのコイルによって生成される磁束が互いに打ち消し合い、コイルの銅損だけになります。 実際には 2 相しかないため (AC 巻線は単相、BD 巻線は単相)、正しい指定は 2 相 6 線式ステッピング モーターです.
バイポーラ ステッピング モーターの駆動回路を図 2 に示します。この回路では、8 つのトランジスタを使用して 2 セットの位相を駆動します。 固定子の磁極には 1 つのコイルが巻かれ、コイル AC と BD の電流方向を変えることで磁極の向きを切り替えます。 ステッピング モーターの初期の開発では、ユニポーラ モーターは、制御回路に必要なトランジスタが少ないため、半導体コンポーネントのコストが原因で、ある程度の適用範囲を獲得しました。 しかし、1950 年代から 1960 年代にかけての半導体材料の急速な発展に伴い、トランジスタのコストが大幅に低下し、バイポーラ モーターがその性能上の利点から急激に使用されるようになりました.
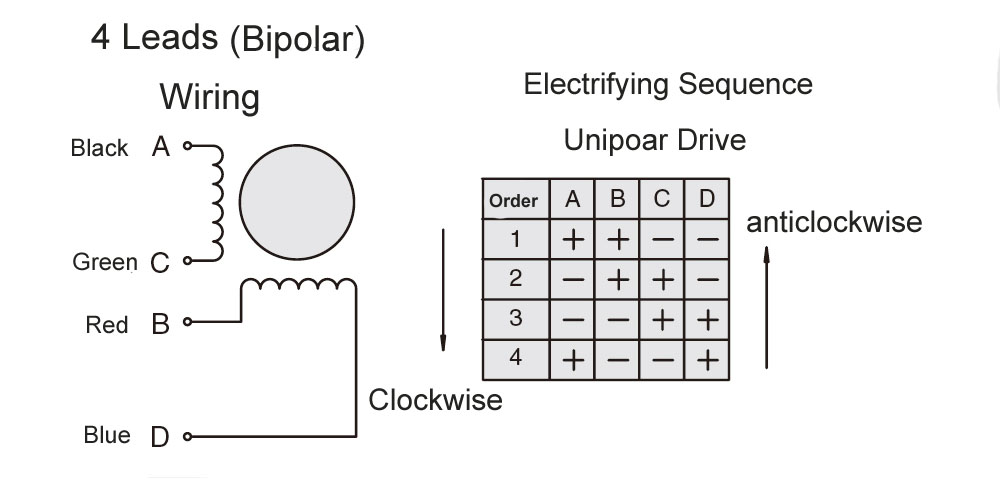
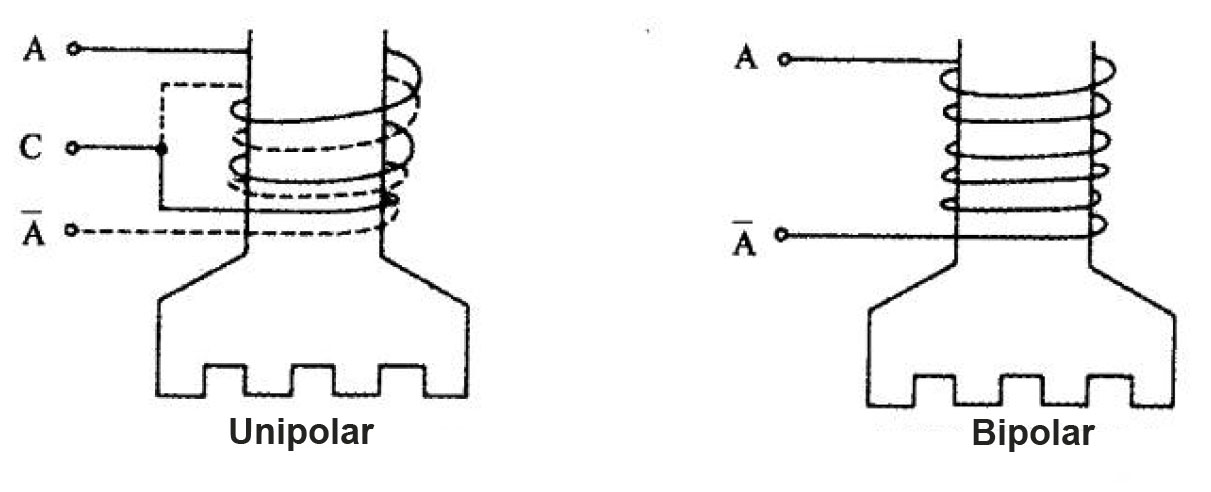
図 3 は、ユニポーラとバイポーラの 2 つの巻き方を示しています。 線径が同じ場合、ユニポーラ方式のコイル巻線の巻数はN、抵抗はR、バイポーラ方式のコイル巻線の巻数は2Nです。 、コイル抵抗は2R.
次の表は、低速での定電圧駆動回路におけるユニポーラ駆動とバイポーラ駆動の効率を比較したものです。 電流とコイルの巻き数の積はアンペアターンと呼ばれ、トルクに比例します。 2 つの速度が同じ場合、出力電力はアンペア ターンに比例します。 同様にバイポーラ電流はV/2R、巻数も2Nとなり、積はユニポーラと同じVN/Rとなります。 入力定電圧駆動の場合のユニポーラとバイポーラの比較を下表に示します。 電流はユニポーラの半分、低速時の効率はユニポーラの2倍.
したがって、小型または低速アプリケーションで高トルクが要求される場合は、バイポーラ モーターとドライバーを使用する必要があります。 高速アプリケーションでは、バイポーラ モーターの巻数が増加し、インダクタンスが大きくなり、逆起電力が増加するため、電流が減少し、トルクが減少します。 したがって、ユニポーラモータとのトルク比較には注意が必要です.
| 単極 | バイポーラ | |
| アンペアターン | U1=V*N/R | U2=V*2N/2R=V*N/R |
| 入力電力 | W1=V²/R | W2=(V/2R)²*2R=V²/2R |
| 効率 | η=U1/W1=N/V | η=U2/W2=2N/V |
注: V は印加電圧です。 R はモーターコイルの抵抗です。 N はユニポーラの巻数
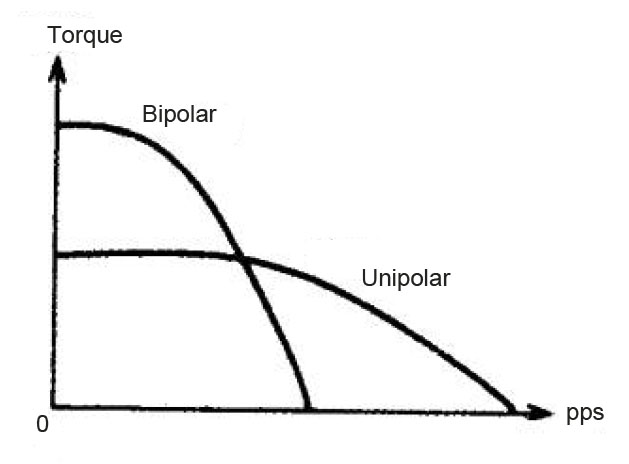
図 4 は、ユニポーラ ステッピング モーターとバイポーラ ステッピング モーターの特性曲線を示しています。どちらも同じ定電流駆動モードを採用しています。 一般に、低速で高トルクのアプリケーションではバイポーラ ドライブが使用され、高速ドライブのアプリケーションではユニポーラ ドライブが使用されます。.