














































































 リード 10mm(0.393701\") 磁気スイッチ付き")
 リード 5mm(0.19685\") 磁気スイッチ付き")
 リード 2mm(0.07874\") 磁気スイッチ付き")
 リード 1mm(0.03937\") 磁気スイッチ付き")
 リード 1mm(0.03937\") 磁気スイッチ付き")
 1.5A 57×57×56mm 762mmケーブル付き Molexコネクタ付き")
 1.5A 57×57×56mm 165mmケーブル付き Molexコネクタ付き")
 リード1mm(0.03937\") センサー付き")
 リード1mm(0.0393インチ) センサー付き")
 リード1mm(0.03937\" ) センサー付き")
 リード2mm(0.0787インチ) センサー付き")















 リード1mm(0.0393インチ) センサー付き")
 リード2mm(0.0787インチ) センサー付き")
 リード2mm(0.0787インチ) センサー付き")
 リード1mm(0.0394インチ) センサー付き")
 リード2mm(0.0787インチ) センサー付き")
 リード2mm(0.0787インチ) センサー付き")
 リード1mm(0.03937インチ) センサー付き")
 リード1mm(0.0393インチ) センサー付き")
 リード2mm(0.0787インチ) センサー付き")
 リード12mm(0.4724インチ) センサー付き")
 1.68A 42x42x48mm 4線 ケーブル長0.085m")
 AWG #22 ツイストペアケーブル、4ピン JST XHP-4コネクタ付き")
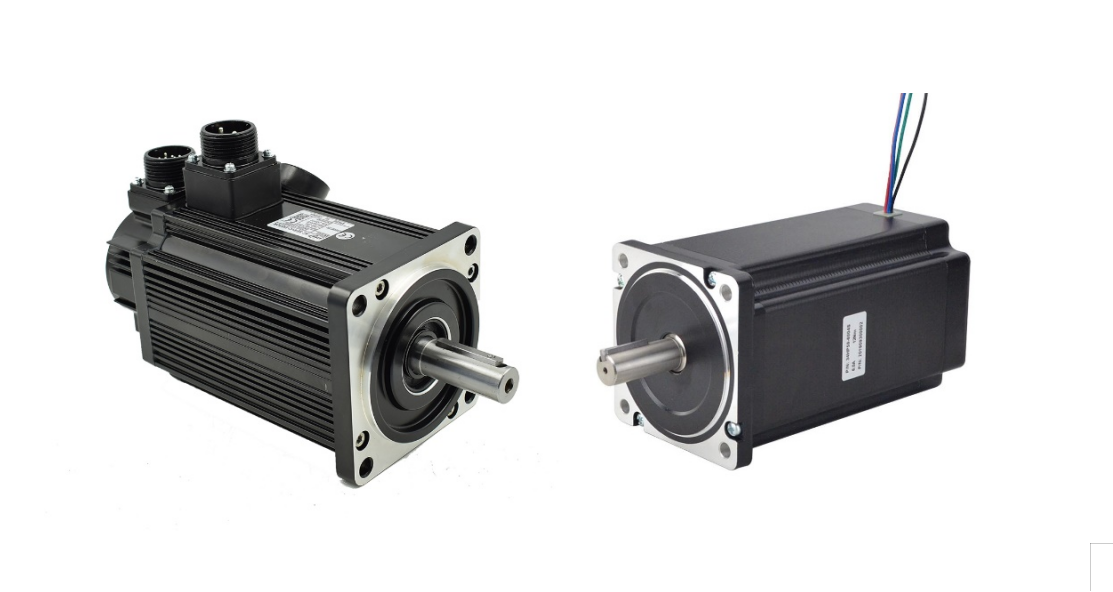
サーボモーターとは?

サーボモーターの定義
サーボ」とは制御機構のことで、ラテン語で奴隷を意味する「servus」に由来する。サーボモーターは、「指示されたとおりに正確に」動作することが信頼できることから名付けられました。
位置や速度などのパラメータを制御できるモーターは、その制御方法に関係なくサーボモーターと呼ばれる。そのため、この用語はステッピングモーターやコアレスモーターを含めて使われることもある。
しかし、ここでは、エンコーダ(回転運動検出器)と、そのエンコーダからの情報を使用して速度と位置(回転角度)を制御するドライバを備えたモータをサーボモータと定義します。
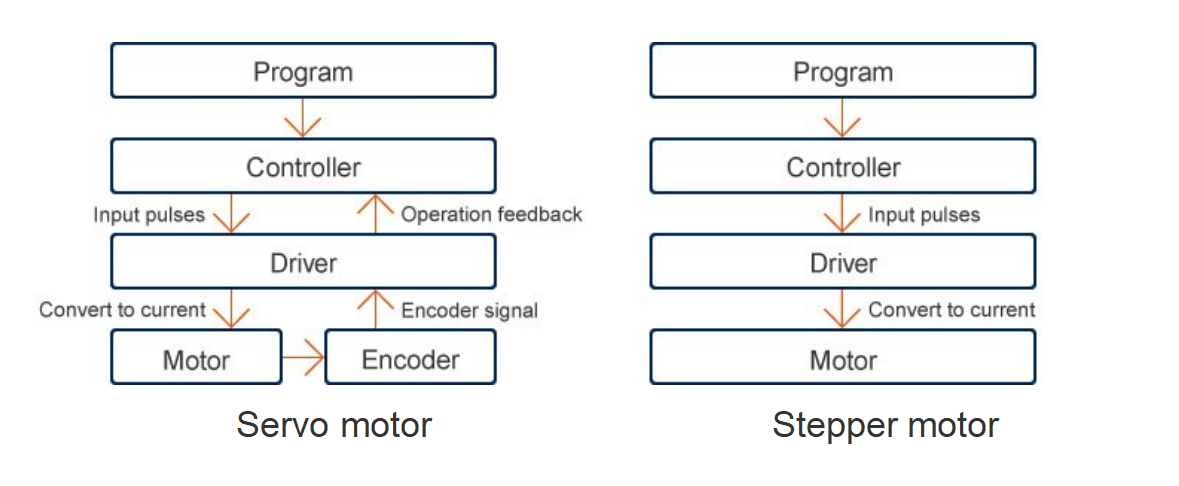
サーボモーターとステッピングモーターの違い
サーボモーターと同様に、ステッピングモーターも外部入力に応じて回転角度を制御することができます。そのため、位置決め機械などにも使用できます。しかし、この2種類のモーターには多くの違いがあります。
1.制御機構
サーボモーターにはエンコーダー(回転運動検出器)があり、回転位置を特定し、モーターの位置をフィードバック制御します。これにより正確な停止精度が得られ、停止時のモーター位置からずれた場合でも元の位置に戻ることができます。一方、ステッピングモーターの場合、モーターの回転角度は入力パルス数に比例する。そのため、コントローラからの入力パルス数で位置を制御する。位置センサーの必要性は回避されるが、それは同時に位置偏差を検出する手段がないことを意味する。例えば、負荷の予期せぬ変化により、モータが非同期(入力で指定された角度とは異なる角度でモータが回転すること)を起こす可能性がある。
2.トルクと速度
サーボモーターは高速で動作し、低速から高速まで広い速度範囲で信頼性の高いトルクを提供することができます。ステッピングモーターは、低速で高いトルクが得られるが、速度が上がるにつれてトルクが低下するため、高速動作には不向きである。
3.コスト
サーボモーターはロータリーエンコーダとサーボコントローラー(ドライバー)を必要とするため、ステッピングモーターよりも高価です。
サーボモーターとステッピングモーターの詳細については、こちらをクリックしてください:サーボモーターとステッピングモーターの比較
サーボモーターの歴史
1950年代から米国では、ベルトコンベヤ、自動機械、産業用ロボットなどの分野で、工場の自動化への関心が高まり始めました。初期の自動機械や産業用ロボットは、アクチュエータの位置決め制御に油圧や空圧を使用する傾向にありましたが、精度や動作の信頼性、関連配管、作動油や空気の漏れといった問題に悩まされていました。
その後、技術の向上により、1950年代から1960年代にかけてDCサーボモーターの使用が増加し、厄介な油圧・空圧機構に代わって産業用ロボットに搭載されるようになった。
産業用ロボットの進歩とともに、サーボモーターの技術も大きく進歩した。1980年代にはACサーボモーターが登場。サーボモーターは、ロボットの小型化、軽量化などの実用的なメリットがあり、現代の産業機械に広く使われている。

サーボモーターの種類
サーボモーターはDCサーボモーターとACサーボモーターに分けられる。
1.DCサーボモーター
ブラシ付きのDC(直流)モーターで駆動するサーボモーターです。ACモーターに比べて制御が容易である。小型で安価なため広く普及しているが、ACモータの制御技術の進歩により、最近ではDCモータの使用は減少傾向にある。
2.ACサーボモーター
交流(AC)モーターで駆動するサーボモーターである。DCモーターに比べて制御が複雑だが、制御技術の進歩により、現在では最も一般的なサーボモーターとなっている。
ACサーボモータは、その駆動機構によって同期モータ(SM)と誘導モータ(IM)に分けられる。これらは永久磁石の有無で区別される。
SMは永久磁石を内蔵している。モータの出力を上げるためには永久磁石の使用量を増やす必要があるが、永久磁石は高価であり、モータのコストが高くなる。そのため、低出力用途(10kWまで)に広く使われている。しかし、近年高性能の永久磁石が入手できるようになったため、同期ACサーボモータがデフォルトの選択肢として好まれるようになった。
IMは永久磁石を使用しないため、高出力用途(10kW以上)に使用される傾向にある。

サーボモータの用途
正確な位置決め特性を持つサーボモータは、産業用ロボットや精密機械などの用途に広く使用されています。用途例としては以下のようなものがある:
- 産業用ロボットの関節
- ヒューマノイドロボットの関節
- 食品加工機械の設備制御
- 包装機械の機器制御
- コンベアのベルト駆動
- 電車の自動ドア
- 液晶・半導体検査装置のX-Yテーブル
- プレス/ロールフィーダー
- 工作機械や検査装置の回転ステージ
- プレス機の制御
- ボンディングマシンの制御
- プラスチック成形機の制御
- アミューズメント機器の制御
- ラジコンなどのホビー用途
- 成膜・蒸着装置
- 液晶・半導体用スピンクリーニングマシン
